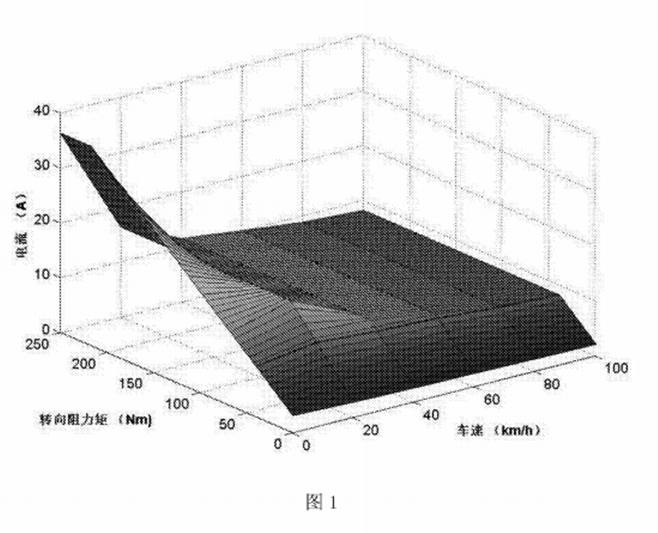
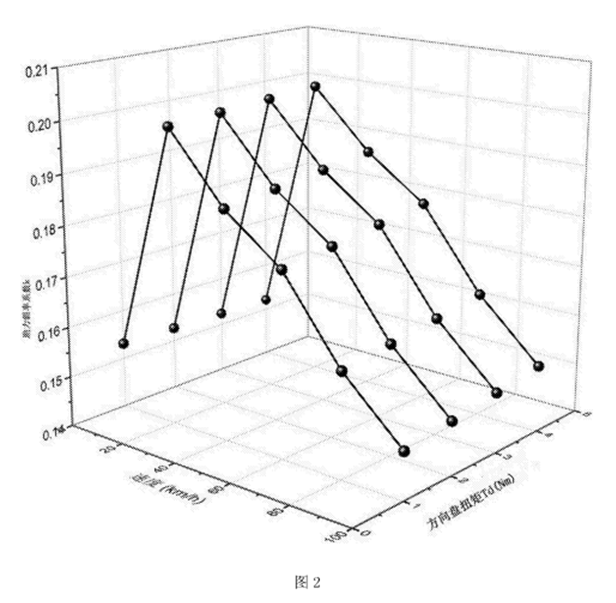
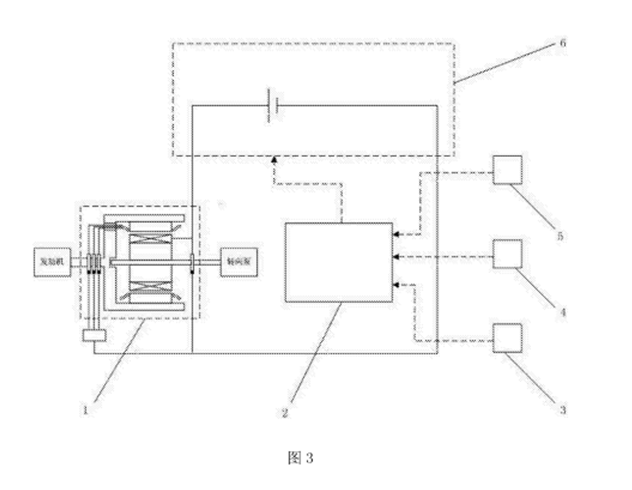
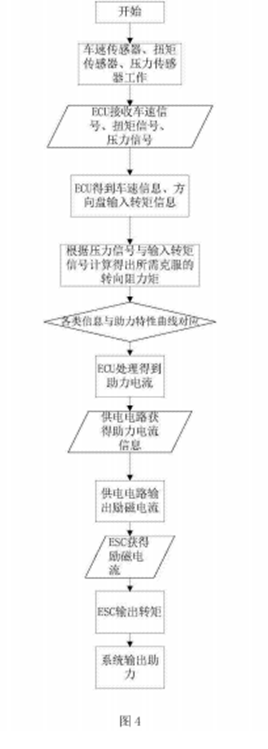
附图说明:图1为一种重型车辆电磁离合器转向助力控制系统在一种输入转矩下助力特性曲线;图2为助力斜率系数K与车速和方向盘扭矩的关系图;图3为一种重型车辆电磁离合器转向助力控制系统结构示意图;图4为一种重型车辆电磁离合器转向助力控制系统工作流程图。图中标记:1、电磁转差离合器;2、控制单元;3、轮速传感器;4、组矩传感器; 5、压力传感器,6、供电电路。
具体实施方式:如图3所示,本发明提出了一种重型车辆电磁离合器转向助力控制系统,包括电磁转差离合器1,控制单元2,轮速传感器3,扭矩传感器4,圧力传感器5,供电电路6。电磁转差离合器1为励磁式电磁转差离合器,控制单元为车载电控单元ECU。供电电路6由供电电源和输电线路组成;轮速传感器3、扭矩传感器4和圧力传感器5均与控制单元2的输入端相连,控制单元2的输出端与供电电路6相连,供电电路6与励磁式电磁转差离合器相连,供电电路6 给励磁式电磁转差离合器供电,励磁式电磁转差离合器输出转速至转向泵,励磁式电磁转差离合器设置在发动机与转向泵之间。
励磁式电磁转差离合器为电磁转差离合器的电控液压助力转向系统(E-ECHPS)的关键动力组件,采用励磁形式产生内部电磁场,由离合器主动部分转动切割磁力线产生力,从而使离合器主动与被动部分发生同向旋转,同时主动与被动部分转速存在差值,且差值大于零。
轮速传感器3安置在车轮轴上,轮速传感器3采用霍尔式轮速传感器,霍尔式轮速传感器由传感头和齿圈组成(传感头由永磁体、霍尔式元件和电子电路组成),应用在尔式原理进行工作,具有输出信号电压振幅不受转速影响、频率响应高、抗电磁波干扰能力强的特点。 轮速传感器3也可与现阶段车辆广泛安装的ABS/ESP系统的轮速传感器并用。
扭矩传感器4安装在方向盘转动杆上,组矩传感器4采用非接触式扭矩传感器,非接触式扭矩传感器由输入轴和输出轴通过扭杆相连,输入轴上有花键,输出轴上有键槽。当扭杆受方向盘的转动力矩作用发生扭转时,输入轴上的花键和输出轴上的键槽之间的相对位置发生改变。花键和键槽的相对位移改变量等于组转杆的扭转量,使得花键上的磁感强度改变,磁感强度的变化,通过线圈转化为电压信号进行输出。非接触式扭矩传感器由于釆用非接触的工作方式,因而寿命长、可靠性高、不易受到磨损、有更小的延时、受轴的偏转和轴向偏移的影响小,被广泛用于汽车领域。
压力传感器5安置在液压缸内,压力传感器5采用压电式压力传感器,压电式压力传感器原理基于压电效应。压电效应是某些电介质在沿一定方向上受到外力的作用而变形时,其内部会产生极化现象,同时在它的两个相对表面上出现正负相反的电荷。当外力去掉后,它又会恢复到不带电的状态,这种现象称为正压电效应。当作用力的方向改变时,电荷的极性也随之改变。相反,当在电介质的极化方向上施加电场,这些电介质也会发生变形,电场去掉后,电介质的变形随之消失,这种现象称为逆压电效应。压电式压力传感器的种类和型号繁多,按弹性敏感元件和受力机构的形式可分为膜片式和活塞式两类。膜片式主要由本体、膜片和压电元件组成。压电元件支撑于本体上,由膜片将被测压力传递给压电元件,再由压电元件输出与被测压力成一定关系的电信号。这种传感器的特点是体积小、动态特性好、耐高温等。
上述三个传感器的信号传输电路均与控制单元相连;控制单元2包括轮速传感器信号接收端,扭矩传感器信号接收端,圧力传感器信号接收端,信号处理单元,助力电流信号输出端;轮速传感器信号接收端与轮速传感器3相连,组矩信号接收端与组矩传感器4相连,压力信号接收端与压力传感器5相连,助力电流信号输出端与供电电路相连。
助力电流随不同车速下的K値成正比线性变化,助力电流随转向阻力矩 Ta的増大而增大,当方向盘转知Td达到某一车速下对应的方向盘理想转矩后,不再变化,K=0。K值随车速的增大而降低,电流峰値小于前一个车速的峰值, 以满足高速行使时转向的路感。原地转向时,电流峰值最大,以满足低速行使,特别是原地转向时转向的轻便。
如图1所示, 一种重型车辆电磁离合器转向助力控制系统在一种输入转矩下助力特性曲线, ECU中信号处理单元中储存有预先标定的在某一车速和某一方向盘输入转矩时的ESC所需电流值;电流值是根据不同车速下,不同的转向阻力所确定的,而转向阻力矩是要根据输入转矩折算而得,所以不同方向盘输入转矩,相同车速下输入电流会有不同。图1中的横坐标是转向阻力知和车速,纵坐标是输出电流,输出电流根据不同车速和转向阻力矩确定。
如图4所示,为本发明提出的一种重型车辆电磁离合器转向助力控制系统的控制流程图,包括步骤如下:步骤1,利用轮速传感器(3)获得轮速信息,利用扭矩传感器(4)获得方向盘组矩信息,利用压力传感器(5)获得液压缸内部压力信息;步骤2,控制单元(2)接收轮速信息,方向盘组矩信息和液压缸内部压力信息;步骤3,控制单元(2)处理方向盘扭矩信息,获得方向盘扭矩大小;步骤4,控制单元(2)处理液压缸内部压力信息,获得此时的压力値,进而处理得到此时的转向阻力矩Ta;步骤5,控制单元(2)处理轮速信息,获得轮速大小,并利用方向盘扭矩大小,处理获得助力斜率K;步骤6,控制单元(2)根据转向阻力定Ta大小和助力斜率系数K的大小,计算得出此时段系统所需助力电流I的值,I= KTa;步骤7,控制单元(2)将助力电流I,输出给供电电路(6);步骤8,供电电路(2)输出相应大小的励磁电流I给电磁转差离合器;步骤9,电磁转差离合器(1)输出相应转速,即转向助力系统输出相应助力。